Esquema del Circuito
- santiago lópez
- Dec 5, 2021
- 1 min read

Updated: Dec 7, 2021
Les paso a explicar como funciona el circuito del robotito Arturito.
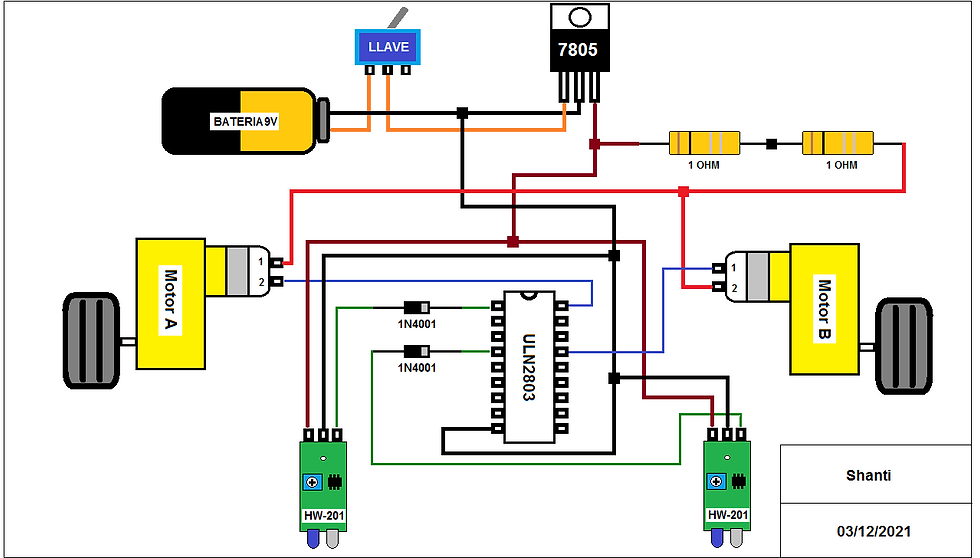
OK. Los sensores infrarrojos (IR) HW-201, se alimentan con 5 volts y Ground (cables Rojo y negro), a través del regulador 7805, que a su vez llega hasta la Batería de 9 volts. Los cuadraditos chiquitos de color indican que allí se unen los cables.[VER PROTOBOARD]
De cada sensor IR, sale un cable verde que pasa a través de un diodo 1N4001. Dicho diodo está para evitar que haya corriente de retorno hacia el sensor.
El ULN2803 es el encargado de hacer las veces de "DRIVER", manejando cada uno de los motorcitos. Fijensé que el "Motor A", está cableado al revez que el "Motor B", esto es para que vayan los dos motores hacia adelante. Fijensé que los motores se alimentan de los 5 volts del regulador, a través de 2 resistencias de 1 ohm. Esto es para que los motores no vayan tan rápido y el robotito ande mejor.
Por último tenemos una llave que enciende o apaga el robotito.
La calibración es importante y no es complicada. Si conectaron los motores bien, el robotito avanza. Si retrocede hay que invertir los cables a los motores y ¡Listo!.
El sensor se calibra con un destornillador perillero philips, cuando detecta negro debe andar el motor, cuando detecta plateado, el motor debe apagarse.



Comments